 |
|
BRAVO TeamAuto !!! L'équipe a été éliminée en phase finale de la compétition. Nous retiendrons une belle manche de barrage en éliminant la très forte 3ème équipe française "VRAC". Notre adversaire (Les autrichiens de Team Dynamics) en 1/8 de finale était trop fort. Le prix de la créativité en poche, les apprentis peuvent être fiers de leur année passée sur ce projet. Nous reprenons la route en direction de la Suisse en ayant fait le plein de bons échanges, de satisfaction d'avoir progressé, de rires et de fatigue :-) Nous espérons que la compétition 2025 apportera aux suivants autant de motivation, de plaisir et d'échanges.   Fin mai, c'était Swisseurobot à la HEIG-VD. Merci pour l'organisation de cette rencontre et BRAVO à TeamAuto !!! 2ème Suisse et qualifiés pour EUROBOT !!! Bonne chance à eux pour le déplacement à La Roche-sur-Yon en France du 8 au 11 mai prochain
>>>>Toutes les infos sur le concours et les résultats ici<<<  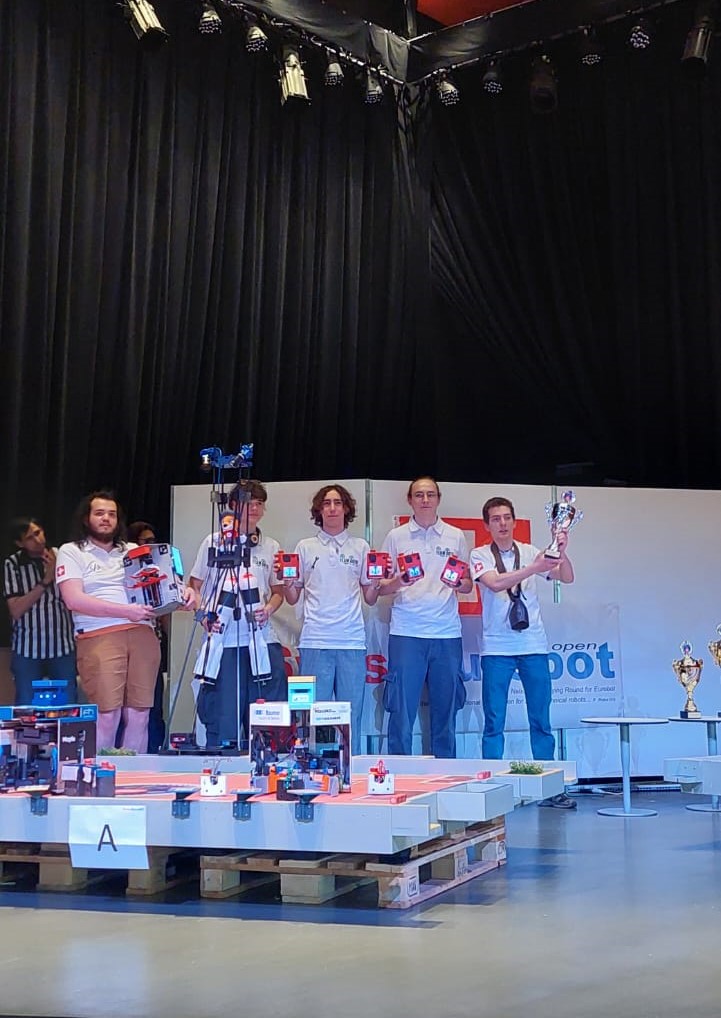  
|


VVV EN 2023 VVV
|
TeamAuto 3ème du championnat Européen !!! 
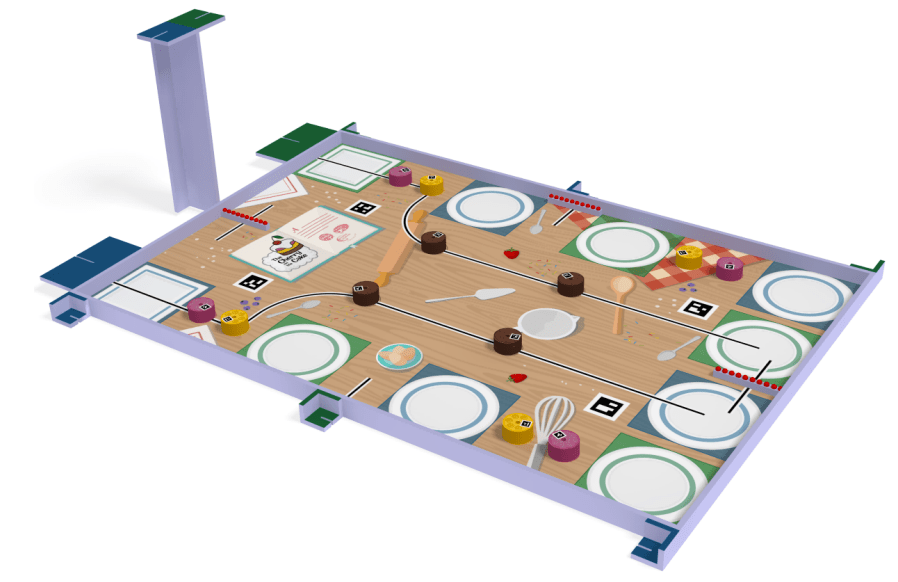
Le logo TeamAuto 2023 et le thème de l'année 2023 : Après de nombreuses années à explorer le monde et l'univers, nos amis les robots ont décidé de devenir boulangers / pâtissiers L'aire de jeu ressemblera à ça :
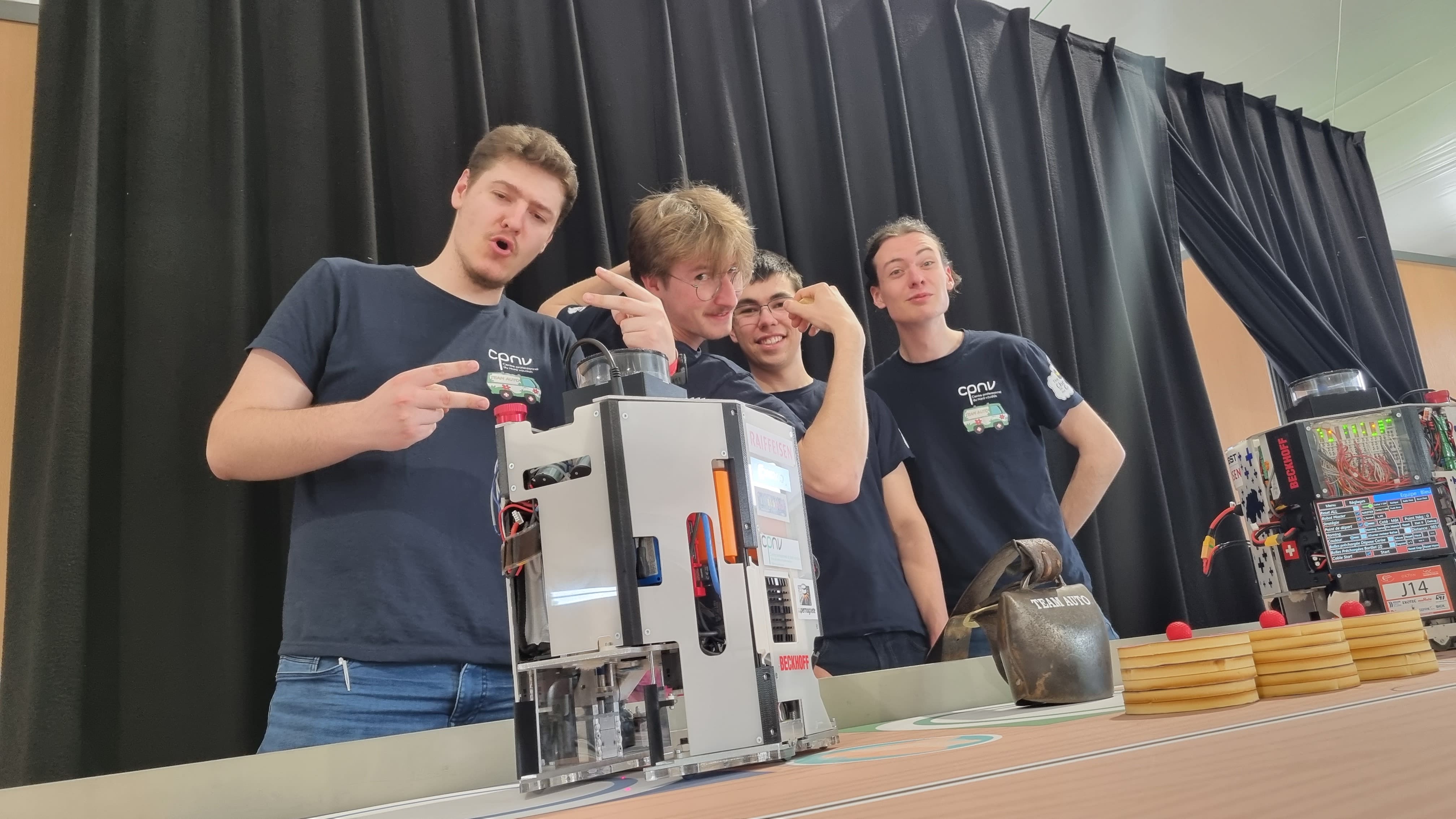
Et pour relever le défi, la "TeamAuto" est composée de 4 apprentis cette année. Programmeurs sur automates Beckhoff : Luca Freund et Thomas Bachmann (Automaticiens) Conception CAO / Développement / Mecanique : Lancelot Conod et Yann Gottraux (Automaticiens)
Lancelot, Thomas, Yann, et Luca
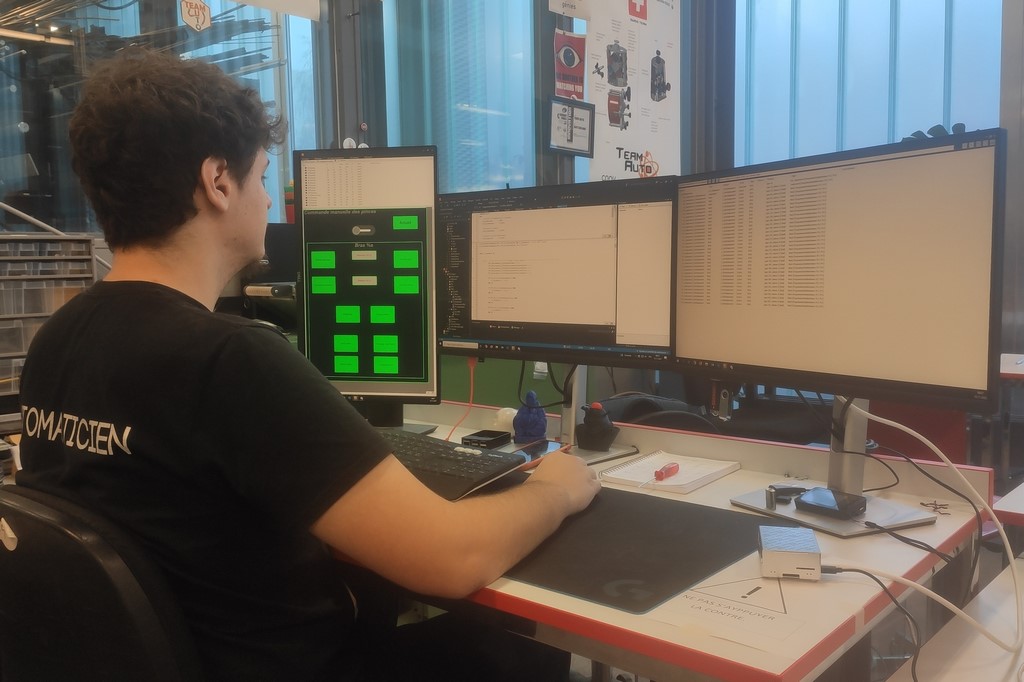
Thomas à la programmation
Lancelot à la CAO
Luca à la programmation
Yann à la CAO |


Souvenir d'EUROBOT 2022 !
Le thème de l'année 2022 : "AGE OF BOTS" Après de nombreuses années à explorer le monde et l'univers, nos amis les robots ont décidé d'explorer leur
passé. En 2022, les robots partiront à la recherche des ruines d'une ancienne civilisation robotique à la recherche des fragments oubliés
de leur origine.
Nos archéologues expérimentés attendent des places de fouilles, des trésors cachés et des statues sacrées et
rien ne les empêchera de retrouver leur passé.
Et pour relever le défi, cette année, la "TeamAuto" est composée de 6 apprentis. Programmeurs sur automates Beckhoff : Tim Vial et Justin Ferrara (Automaticiens) Conception CAO / Développement / Mecanique : Jordan Schott, Luca Donati et Michael Gregorio (Automaticiens) Electronique / Traitement image : Aymeric Clauzel (Electronicien)
Michael, Lucas, Justin, Jordan, Tim, Aymerick
Les programmeurs se sont préparés deux places de travail au top !
A l'action !
C'est parti également pour Lucas à la CAO !
Ci-dessous, ce qu'il s'est passé en 2019 BRAVO TEAM AUTO ! 3ème à EUROBOT !!! Le thème de l'année 2019 était : "Atom factory". On fête les 150 ans de la création de la table de Mendeleïev L'équipe 2018-2019 était composée de 4 apprentis : - Adrien Jaquiéry, automaticien (programmation) - Roméo Bornand, automaticien (design mécanique, conception) - Aurélien Rochat, automaticien (design mécanique, conception) - Stanislav Boïko, automaticien (programmation), n'a pas participé à Eurobot Et merci à François Periard, électronicien qui a fabriqué la carte de gestion des pompes à vide. 

L'équipe "TeamAuto" 2017 |



.JPG)

